|
Дата публикации: 15 июля 2020 г. #США #ВУЗ #ИИ В MIT создали робота, манипулирующего проводамиИсследователи лаборатории информатики и искусственного интеллекта Массачусетского технологического института (Massachusetts Institute of Technology, MIT) разработали робота с мягкими чувствительными пальцами, который может обрабатывать кабели с беспрецедентной ловкостью.
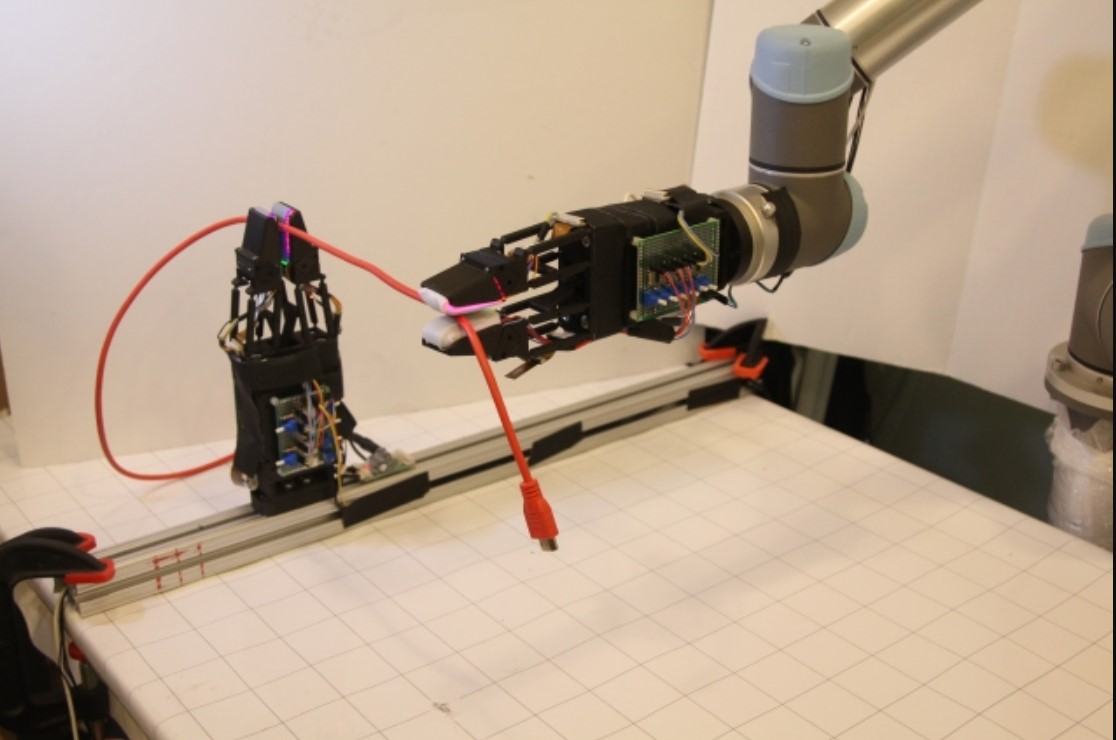
Если для людей может быть сложно манипулировать тонкими гибкими объектами, такими как веревки, провода или кабели, то для роботов это почти невозможно. Поскольку кабель скользит между пальцами, пальцы робота должны постоянно ощущать и регулировать положение и движение кабеля. Группа исследователей из Лаборатории информатики и искусственного интеллекта Массачусетского технологического института (MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL)) решили задачу успешного манипулирования кабелем, используя пару мягких роботизированных захватов с тактильными датчиками с высоким разрешением (без механических ограничений). Такой робот может быть успешно использован как для промышленных, так и для бытовых задач, в будущем роботы смогут завязывать узлы, формировать проволоки или даже накладывать хирургический шов. Первым шагом команды было создание нового двухпалого захвата. На кончиках пальцев робота расположены датчики GelSight, изготовленные из мягкой резины со встроенными камерами. Вторым шагом команды было создание структуры восприятия и контроля, позволяющей манипулировать кабелями. Для восприятия они использовали датчики GelSight, чтобы оценить положение кабеля между пальцами и измерить силы трения при скольжении кабеля. Два контроллера работают параллельно: один модулирует силу захвата, а другой регулирует позу захвата, чтобы держать кабель внутри захвата. При установке на рычаг захват может надежно следовать кабелю USB, начиная со случайного положения захвата. Затем, в сочетании со вторым захватом, робот может перемещать кабель, как это сделал бы человек, чтобы найти конец кабеля. Он также может адаптироваться к кабелям из разных материалов и толщины. «Манипулирование мягкими объектами часто встречается в нашей повседневной жизни, например, манипулирование кабелями, сгибание ткани и завязывание нитей», - сказал Ю Ши (Yu She), постдок MIT и ведущий автор статьи. «Во многих случаях мы хотели бы, чтобы роботы помогали людям выполнять такую работу, особенно когда задачи повторяются, монотонны или небезопасны». Источник: news.mit.edu
Популярные издания ФГБНУ «Аналитический центр»
Издания 2019 года
Издания 2018 года
открыть полный список изданий Центра → Документ был изменён 11.11.2019 в 10:50. |
Поиск данных
об аттестации педагогических работников Издания Центра
|
||||||

Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное научное учреждение
«Экспертно-аналитический центр»
«Экспертно-аналитический центр»
Москва, ул. Талалихина, д. 33, стр. 4. Телефон: (495) 663-20-13





![[Valid RSS]](/_img/valid-rss-rogers.png "Validate my RSS feed")